|
|
|
|
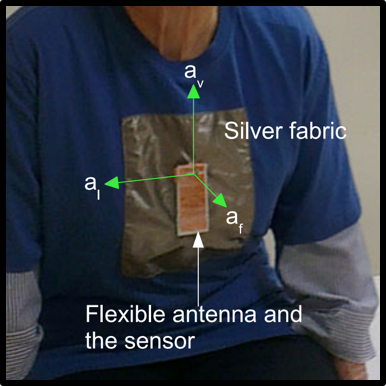
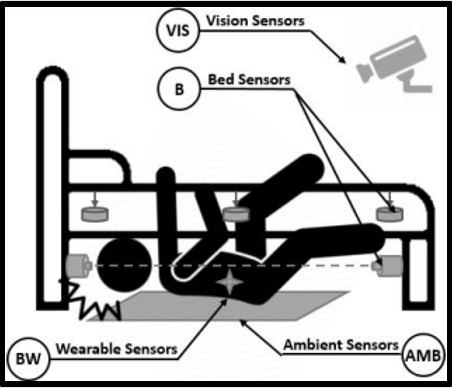
I. Research objective Falls can cause serious health issues for the elderly. In hospitals and care centers, one of the primary reasons for elderly falls is attempting to leave the bed without assistant. Traditional bed-exit sensors use pressure-sensing mats (Fig. 1(a)). However, it is challenging to set appropriate trigger thresholds for lightweight or restless patients. When the threshold is too low, the false alarm rate increases significantly. Wearable sensors (Fig. 1(b)) are considered an alternative to pressure-sensing mats. However, wearing sensors for extended periods may cause discomfort to the elderly while sleeping. Some studies have proposed the use of monitors combined with computer vision (Fig. 1(c)), which can accurately detect human movements but raise privacy concerns. In view of this, our team proposes a bed-exit detection system based on ultrasonic sensors, infrared sensors, and accelerometers. The ultrasonic sensors are used to monitor the direction of movement on the bed. The infrared sensors are used to detect the action of the elderly leaving the bed. Once the infrared sensor is triggered, the system sends a bed-exit event warning to the caregiver. Lowering the bed rail increases the risk of the elderly falling from the bed, thus triggering an alarm to prevent potential falls. In our experiments, 13 healthy subjects performed 390 bed-exit movements, of which 97.7% were correctly identified. In real-world scenarios, seven bed-exit movements by elderly individuals were detected before they left the beds. The results demonstrate that the system can detect bed-exit movements with high sensitivity and promptly notify caregivers, proving the effectiveness of our system in practical applications. We anticipate that this system will play a greater role in future caregiving practices. |
|
|
| |
|
(a) (b) (c) |
|
|
Figure 1. Bed-exit alarms: (a) Pressure-sensing mat (b) Wearable sensor (c) Monitor combined with computer vision |
|


|
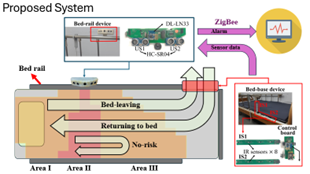
II. Research contents Multi-Stage Bed-Exit Sensing System: The proposed system consists of a bed-rail device and a bed-base device (Fig. 2(a)), with the overall appearance shown in Fig. 2(b). The bed-base device is fixed under the bed and includes a microcontroller, a ZigBee module, and two perpendicular sensing strips, which are fixed in the gap between the footboard and the bed-rail. Each sensing strip contains four infrared sensors, serving as an infrared grid to detect whether someone is in the gap. To identify bed-exit motions at an early stage, the bed-rail device utilizes two ultrasonic sensors (US1 and US2). When the bed user leaves the bed, they pass through the detection area of the ultrasonic sensors. Additionally, a three-axis accelerometer is integrated into the sensing strip to monitor the tilt angle of the bed rail. When movement through the gap or the lowering of the bed rail is detected, the system sends an alert via ZigBee, notifying caregivers of the bed-exit event. |
|
|
(a) (b) | |
|
Figure 2. (a) System principle (b) System appearance |
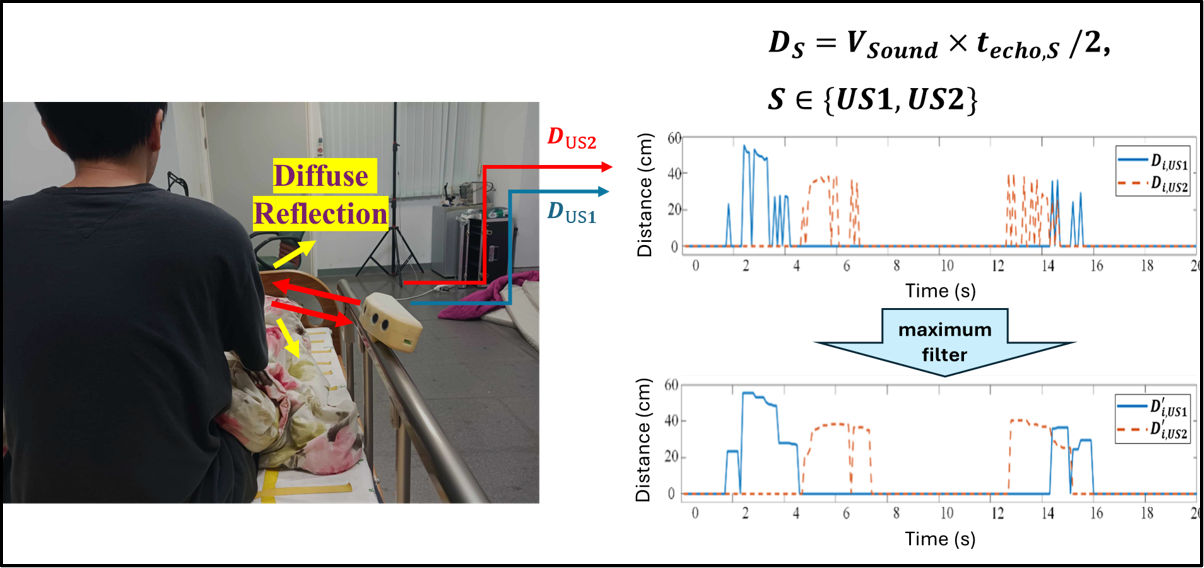
Data Preprocessing: The proposed system uses ultrasonic sensors to measure the distance between the bed rail and the human body to identify the moving direction of the person. The distance is calculated based on the time taken for the ultrasonic wave to travel from the emitter to the human body and back to the receiver, as shown in the following equation: |
|
Ds = (V × techo,S) / 2 |
Here, V is the speed of sound, which is 343 meters per second; S∈{US1,US2} denotes the ultrasonic sensors; techo,S is the time from emission to reception of the ultrasonic wave, and Ds is the distance value between the corresponding sensor and the bed user. However, clothing can cause attenuation of the reflected wave, leading to missing distance measurements. Fig. 3 shows the raw data from the two ultrasonic sensors, with missing values represented as 0. To prevent these values from affecting the integrity of feature extraction, a filter is used to compensate for these missing values. The smoothed waveforms after filter compensation are represented by D'US1 and D'US2, which are used for feature extraction. |
|
Figure 3. Ultrasonic signal compensation |
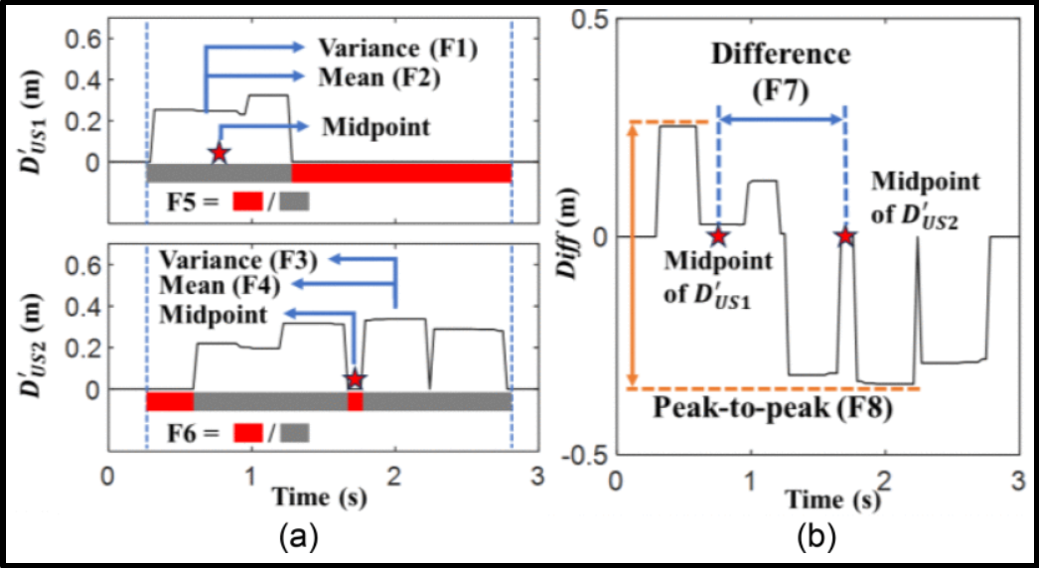
Algorithm: The ultrasonic signals, D'US1 and D'US2, are classified into one of the following three categories: 1) "Bed-leaving," 2) "Returning-to-Bed," and 3) "No-Risk." "Bed-leaving" is defined as moving towards the foot of the bed and exiting through the gap. Conversely, moving back towards the head of the bed is considered "Returning-to-Bed." Any incomplete bed-exit or return-to-bed motions are classified as "No-Risk." An SVM classifier and eight features are used to classify the bed motions, as shown in Fig. 4. When the subject exits the bed, they first approach US1 and US2, then move away, resulting in large distance values and changes in D'US1 and D'US2. Therefore, the variance and mean values of D'US1 and D'US2 (F1, F2, F3, and F4) are used as features to identify bed-exit motions. Additionally, before exiting the bed, the subject moves the covering blanket, which attenuates the reflected wave, causing distance readings to be zero. Hence, the proportion of zero readings in D'US1 and D'US2 (F5 and F6) are used as features. In Fig. 4(a), zero and non-zero readings are shown in red and gray, respectively. Since non-zero readings are caused by the reflected wave from the subject, the midpoint of the gray portion represents the moment when the person passes directly in front of US1 and US2. Fig. 4(b) shows that when the subject moves towards the foot of the bed, the midpoint of D'US1 will be reached before the midpoint of D'US2, as the subject first enters the detection range of US1. Therefore, the difference between the two midpoints can be used as a feature to determine the movement direction of the bed user. Additionally, a differential signal (Diff) is generated through US1 and US2: |
|
Diff = D'US1 - D'US2 |
|
|
During bed-exit, when the subject enters the detection range of US1 or leaves the detection range of US2, large Diff values are produced. This is also used as a feature (F8). |
|
|
Figure 4. Feature extraction of ultrasonic signals. |
|
|
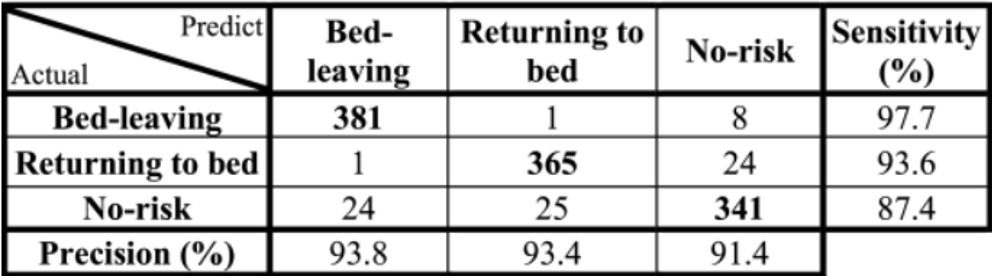
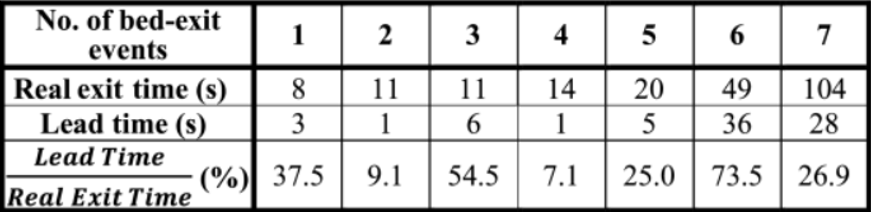
Experiment and Discussion: Table 1 shows that for detecting bed-exit, return-to-bed, and no-risk motions, the sensitivity of the SVM classifier reached 97.7%, 93.6%, and 87.4%, respectively. The overall detection accuracy is 93%. The detection accuracy for no-risk motions is 93.1%, indicating that the system's performance in handling false alarms is better than that of traditional pressure bed-exit alarms used in hospitals. Additionally, this study conducted 24-hour monitoring on 10 elderly subjects without requiring them to perform specific actions. Table 2 shows a total of 7 bed-exit events detected, with actual bed-exit times ranging from 8 seconds to 104 seconds. The ratio of warning time to actual bed-exit time varies from 7.1% to 73.5%. These events were detected on average 11.4 seconds before bed-exit occurred. Finally, in Table 3, after comparing with previous works, it is evident that the method proposed in this paper has higher sensitivity and provides early warning before bed-exit, thus preventing falls from occurring. |
|
|
Table 1. Evaluation of proposed SVM classifier |
|
|
Table 2. Detection results of 7 real bed-exit events collected in the hospital |
|
|
Table 3. Comparison of proposed system with related work |
|