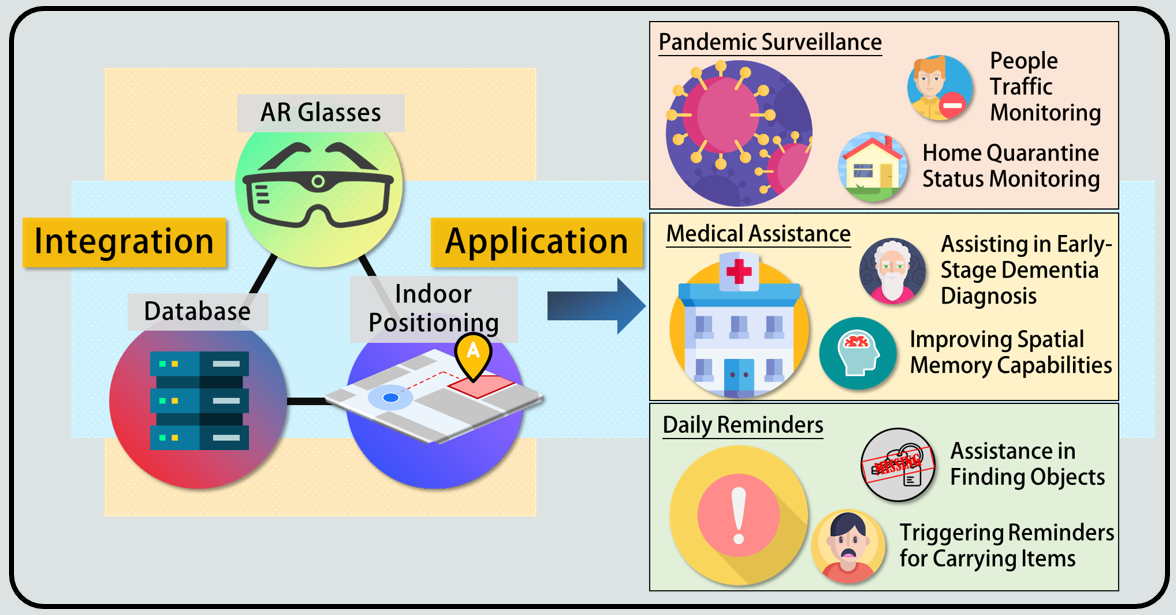
| I. Research objective Indoor positioning plays a crucial role in the world of the Internet of Things (IoTs), including applications such as security monitoring, smart home, healthcare, and marketing. In a business environment, indoor positioning can be utilized for security surveillance, for instance, in stores, offices, or warehouses, to monitor the activities of employees and visitors, promptly detecting any suspicious behavior or security risks. In healthcare facilities, indoor positioning can assist in monitoring the locations of patients, and can provide some automated alert systems, such as issuing alerts when a patient fall. |
|
|
|
Figure 1. The application of indoor positioning technology in various fields./strong> |
|
|---|---|
| II. Research content In recent years, computer vision-based trajectory tracking methods have gradually become mainstream. However, setting up a large number of cameras is costly, and the system is variable to environmental factors such as brightness and object occlusion. Another type of tracking method is based on wireless transmission of Received Signal Strength Indication (RSSI) for triangulation, including Bluetooth Low Energy (BLE) and Ultra-Wideband (UWB). Compared to BLE, UWB provides higher positioning accuracy through Time-of-Flight (ToF) ranging. Additionally, its higher frequency and wider bandwidth make it more resistant to signal interference, and its ability for high-speed data transmission enables it to track multiple targets or track in complex environments. |
||
|
||
|
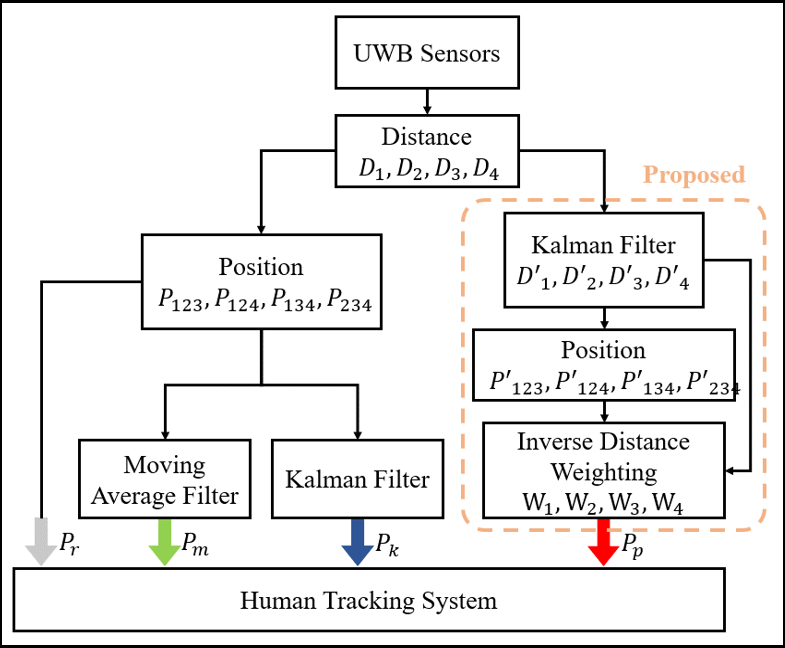
Figure 2. The wearable UWB transmitter made by our laboratory |
||
|
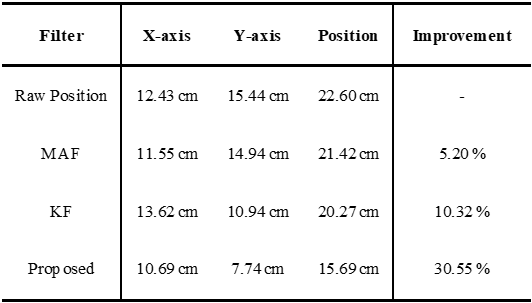
Our laboratory has proposed a real-time indoor positioning system, which provides users with path information of individuals within the field. The system comprises a wearable UWB transmitter (Fig.2) and four UWB receiving base stations. By using a Kalman Filter to eliminate noise and combining it with the proposed trajectory tracking algorithm (Fig.3), experiment results (Table.1) demonstrate that the algorithm proposed by our laboratory reduces the Root Mean Square (RMS) error to 15.69 cm. This achievement indicates more precise positioning performance compared to other human tracking algorithms (Fig.4). |
||
|
||
Figure 3. Four algorithm architectures for human tracking system, including raw position, Moving Average Filter, Kalman Filter, and proposed method. |
||
|---|---|---|
|
||
|
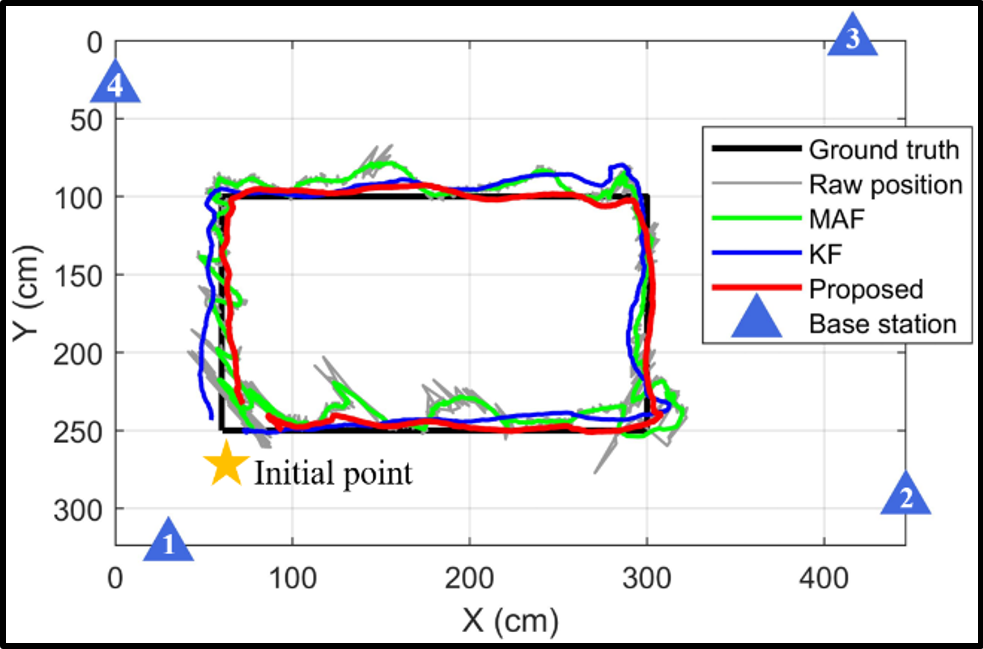
Table 1. The RMS error of indoor positioning |
Figure 4. Experiment result of our proposed indoor positioning system. |
|

| Related Research of our laboratory: | ||
[1] Yuan-Hao Ho, Wen-Yen Shieh, Pi-Shan Sung, and Chih-Lung Lin, “A Real-Time Customer Tracking System Based on Ultra-Wideband Sensors,”2021 IEEE 10th Global Conference on Consumer Electronics (GCCE), Kyoto, Japan, 2021. (Excellent Paper Awards Outstanding Prize) |
||
|
[2] Yuan-Hao Ho, Guan-Hao Hou, Meng-Hsuan Wu, Fu-Hsing Chen, Pi-Shan Sung, Chieh-Hsu Chen, and Chih-Lung Lin, “High-Precision UWB Indoor Positioning System for Customer Pathway Tracking,”2019 IEEE 8th Global Conference on Consumer Electronics (GCCE), Osaka, Japan, 2019. |
||